- жөҸи§Ҳ: 1477473 ж¬Ў
-

ж–Үз« еҲҶзұ»
зӨҫеҢәзүҲеқ—
- жҲ‘зҡ„иө„и®Ҝ ( 0)
- жҲ‘зҡ„и®әеқӣ ( 0)
- жҲ‘зҡ„й—®зӯ” ( 0)
еӯҳжЎЈеҲҶзұ»
- 2014-11 ( 6)
- 2014-10 ( 2)
- 2014-09 ( 2)
- жӣҙеӨҡеӯҳжЎЈ...
жңҖж–°иҜ„и®ә
-
alcoholпјҡ
Androidзҡ„зүҲжң¬и¶ҠдҪҺпјҢе°ұи¶ҠжҳҺжҳҫ
Android дёӢжӢүеҲ·ж–°жҺ§д»¶д№ӢScrollViewзүҲжң¬е®һзҺ° -
alcoholпјҡ
жҘјдё»пјҢиҝҷжңүдёӘbugе‘ҖпјҢе°ұжҳҜеңЁдёӢжӢүеҲ°дёҖе®ҡдҪҚзҪ®ж—¶пјҢtopдјҡиҰҶзӣ–еҶ…е®№ ...
Android дёӢжӢүеҲ·ж–°жҺ§д»¶д№ӢScrollViewзүҲжң¬е®һзҺ° -
atomduanпјҡ
http://www.grobmeier.de/the-10- ...
зҰ…йҒ“зЁӢеәҸе‘ҳзҡ„10жқЎеҺҹеҲҷ -
jobboleпјҡ
жңӢеҸӢпјҢиҪ¬иҪҪж–Үз« пјҢж•…ж„ҸдёҚдҝқз•ҷеҲ йҷӨзҪІеҗҚйӮЈдёҖиЎҢпјҢжҳҜдёҚжҳҜдёҚйҒ“еҫ·пјҹеҺҹж–ҮеҮә ...
зҰ…йҒ“зЁӢеәҸе‘ҳзҡ„10жқЎеҺҹеҲҷ -
jiuyueheпјҡ
ж„ҹи§үиҝҷе°ұжҳҜеңЁиҜҙжҲ‘е•Ҡ
зҰ…йҒ“зЁӢеәҸе‘ҳзҡ„10жқЎеҺҹеҲҷ
u-bootеҲҶжһҗпјҲдёҖпјү
дёҖгҖҒbootloaderзҡ„жҰӮеҝө
з®ҖеҚ•зҡ„иҜҙпјҢbootloaderе°ұжҳҜеңЁж“ҚдҪңзі»з»ҹиҝҗиЎҢд№ӢеүҚиҝҗиЎҢзҡ„дёҖж®өе°ҸзЁӢеәҸпјҢйҖҡиҝҮиҝҷж®өе°ҸзЁӢеәҸпјҢжҲ‘们еҸҜд»ҘеҲқе§ӢеҢ–硬件и®ҫеӨҮпјҢз®ҖеҺҶеҶ…еӯҳз©әй—ҙжҳ е°„еӣҫпјҢд»ҺиҖҢе°Ҷзі»з»ҹзҡ„иҪҜ硬件зҺҜеўғеёҰеҲ°дёҖдёӘеҗҲйҖӮзҡ„зҡ„зҠ¶жҖҒпјҢдёҖиҫ№жңҖз»Ҳи°ғз”Ёж“ҚдҪңзі»з»ҹеҶ…ж ёеҮҶеӨҮеҘҪжӯЈзЎ®зҡ„зҺҜеўғгҖӮ
йҖҡеёёпјҢbootloaderжҳҜдёҘйҮҚзҡ„дҫқиө–дәҺ硬件иҖҢе®һзҺ°зҡ„пјҢзү№еҲ«еңЁеөҢе…ҘејҸдё–з•ҢпјҢе»әз«ӢдёҖдёӘйҖҡз”Ёзҡ„bootloaderеҮ д№ҺжҳҜдёҚеҸҜиғҪзҡ„пјҢе°Ҫз®ЎеҰӮжӯӨпјҢжҲ‘们д»Қ然еҸҜд»ҘеҜ№bootloaderеҪ’зәіеҮәдёҖдәӣйҖҡз”Ёзҡ„жҰӮеҝөжқҘпјҢд»ҘжҢҮеҜјз”ЁжҲ·зү№е®ҡзҡ„bootloaderи®ҫи®ЎдёҺе®һзҺ°гҖӮ
еҪ“然пјҢеңЁarm7дёҺarm9зҡ„ејҖеҸ‘еә”з”ЁдёӯпјҢд№ҹжңүи®ёеӨҡжҳҜдёҚйңҖиҰҒlinuxж“ҚдҪңзі»з»ҹзҡ„пјҢиҖҢжҳҜзӣҙжҺҘејҖеҸ‘иЈёжңәзҡ„д»Јз ҒпјҢеҲ«д»Ҙдёәе°ұдёҚиҰҒbootloaderдәҶпјҢеҸҚиҖҢеҸҜд»ҘеҲ©з”ЁbootloaderеҠ еҝ«иЈёжңәзҡ„ејҖеҸ‘пјҢеә”з”ЁеңЁbootloaderиҝҗиЎҢеҗҺпјҢжҜ”еҰӮu-bootпјҢеҹәжң¬дёҠж”ҜжҢҒжүҖжңүзҡ„еӨ–и®ҫпјҢеҸҜд»ҘиҜҙubootе°ұжҳҜдёҖдёӘе°ҸеһӢзҡ„ж“ҚдҪңзі»з»ҹпјҢиЈёжңәд»Јз ҒеҸҜд»ҘзӣҙжҺҘе»әз«ӢеңЁubootд№ӢдёҠпјҢжңүе…ҙи¶ЈеҸҜд»ҘеҒҡдёҖдәӣиҝҷж ·зҡ„ејҖеҸ‘гҖӮдёҚеңЁжң¬ж–Үзҡ„и®Ёи®әиҢғеӣҙгҖӮ
дәҢгҖҒbootloaderзҡ„еҲҶеұӮ
йҖҡеёёеӨҡйҳ¶ж®өзҡ„ Boot Loader иғҪжҸҗдҫӣжӣҙдёәеӨҚжқӮзҡ„еҠҹиғҪпјҢд»ҘеҸҠжӣҙеҘҪзҡ„еҸҜ移жӨҚжҖ§гҖӮд»ҺеӣәжҖҒеӯҳеӮЁи®ҫеӨҮдёҠеҗҜеҠЁзҡ„ Boot Loader еӨ§еӨҡйғҪжҳҜ 2 йҳ¶ж®өзҡ„еҗҜеҠЁиҝҮзЁӢпјҢд№ҹеҚіеҗҜеҠЁиҝҮзЁӢеҸҜд»ҘеҲҶдёә stage 1 е’Ң stage 2 дёӨйғЁеҲҶгҖӮз”ұдәҺ Boot Loader зҡ„е®һзҺ°дҫқиө–дәҺ CPU зҡ„дҪ“зі»з»“жһ„пјҢеӣ жӯӨеӨ§еӨҡж•° Boot Loader йғҪеҲҶдёә stage1 е’Ң stage2 дёӨеӨ§йғЁеҲҶгҖӮдҫқиө–дәҺ CPU дҪ“зі»з»“жһ„зҡ„д»Јз ҒпјҢжҜ”еҰӮи®ҫеӨҮеҲқе§ӢеҢ–д»Јз ҒзӯүпјҢйҖҡеёёйғҪж”ҫеңЁ stage1 дёӯпјҢиҖҢдё”йҖҡеёёйғҪз”ЁжұҮзј–иҜӯиЁҖжқҘе®һзҺ°пјҢд»ҘиҫҫеҲ°зҹӯе°ҸзІҫжӮҚзҡ„зӣ®зҡ„гҖӮиҖҢ stage2 еҲҷйҖҡеёёз”ЁCиҜӯиЁҖжқҘе®һзҺ°пјҢиҝҷж ·еҸҜд»Ҙе®һзҺ°з»ҷеӨҚжқӮзҡ„еҠҹиғҪпјҢиҖҢдё”д»Јз Ғдјҡе…·жңүжӣҙеҘҪзҡ„еҸҜиҜ»жҖ§е’ҢеҸҜ移жӨҚжҖ§гҖӮзҶҹзҹҘзҡ„ubootе°ұжҳҜеҲҶдёәstage1дёҺstage2.
дёүгҖҒbootloaderзҡ„дё»иҰҒд»»еҠЎдёҺе…ёеһӢз»“жһ„жЎҶжһ¶
Boot Loader зҡ„ stage1 йҖҡеёёеҢ…жӢ¬д»ҘдёӢжӯҘйӘӨ(д»Ҙжү§иЎҢзҡ„е…ҲеҗҺйЎәеәҸ)пјҡ
-
硬件и®ҫеӨҮеҲқе§ӢеҢ–гҖӮ
-
дёәеҠ иҪҪ Boot Loader зҡ„ stage2 еҮҶеӨҮ RAM з©әй—ҙгҖӮ
-
жӢ·иҙқ Boot Loader зҡ„ stage2 еҲ° RAM з©әй—ҙдёӯгҖӮ
-
и®ҫзҪ®еҘҪе Ҷж ҲгҖӮ
-
и·іиҪ¬еҲ° stage2 зҡ„ C е…ҘеҸЈзӮ№гҖӮ
Boot Loader зҡ„ stage2 йҖҡеёёеҢ…жӢ¬д»ҘдёӢжӯҘйӘӨ(д»Ҙжү§иЎҢзҡ„е…ҲеҗҺйЎәеәҸ)пјҡ
-
еҲқе§ӢеҢ–жң¬йҳ¶ж®өиҰҒдҪҝз”ЁеҲ°зҡ„硬件и®ҫеӨҮгҖӮ
-
жЈҖжөӢзі»з»ҹеҶ…еӯҳжҳ е°„(memory map)гҖӮ
-
е°Ҷ kernel жҳ еғҸе’Ңж №ж–Ү件系з»ҹжҳ еғҸд»Һ flash дёҠиҜ»еҲ° RAM з©әй—ҙдёӯгҖӮ
-
дёәеҶ…ж ёи®ҫзҪ®еҗҜеҠЁеҸӮж•°гҖӮ
- и°ғз”ЁеҶ…ж ёгҖӮ
(1)еҹәжң¬зҡ„硬件еҲқе§ӢеҢ–
иҝҷжҳҜ Boot Loader дёҖејҖе§Ӣе°ұжү§иЎҢзҡ„ж“ҚдҪңпјҢе…¶зӣ®зҡ„жҳҜдёә stage2 зҡ„жү§иЎҢд»ҘеҸҠйҡҸеҗҺзҡ„ kernel зҡ„жү§иЎҢеҮҶеӨҮеҘҪдёҖдәӣеҹәжң¬зҡ„硬件зҺҜеўғгҖӮе®ғйҖҡеёёеҢ…жӢ¬д»ҘдёӢжӯҘйӘӨпјҲд»Ҙжү§иЎҢзҡ„е…ҲеҗҺйЎәеәҸпјүпјҡ
1пјҺеұҸи”ҪжүҖжңүзҡ„дёӯж–ӯгҖӮдёәдёӯж–ӯжҸҗдҫӣжңҚеҠЎйҖҡеёёжҳҜ OS и®ҫеӨҮй©ұеҠЁзЁӢеәҸзҡ„иҙЈд»»пјҢеӣ жӯӨеңЁ Boot Loader зҡ„жү§иЎҢе…ЁиҝҮзЁӢдёӯеҸҜд»ҘдёҚеҝ…е“Қеә”д»»дҪ•дёӯж–ӯгҖӮдёӯж–ӯеұҸи”ҪеҸҜд»ҘйҖҡиҝҮеҶҷ CPU зҡ„дёӯж–ӯеұҸи”ҪеҜ„еӯҳеҷЁжҲ–зҠ¶жҖҒеҜ„еӯҳеҷЁпјҲжҜ”еҰӮ ARM зҡ„ CPSR еҜ„еӯҳеҷЁпјүжқҘе®ҢжҲҗгҖӮ
2пјҺи®ҫзҪ® CPU зҡ„йҖҹеәҰе’Ңж—¶й’ҹйў‘зҺҮгҖӮ
3пјҺRAM еҲқе§ӢеҢ–гҖӮеҢ…жӢ¬жӯЈзЎ®ең°и®ҫзҪ®зі»з»ҹзҡ„еҶ…еӯҳжҺ§еҲ¶еҷЁзҡ„еҠҹиғҪеҜ„еӯҳеҷЁд»ҘеҸҠеҗ„еҶ…еӯҳеә“жҺ§еҲ¶еҜ„еӯҳеҷЁзӯүгҖӮ
4пјҺеҲқе§ӢеҢ– LEDгҖӮе…ёеһӢең°пјҢйҖҡиҝҮ GPIO жқҘй©ұеҠЁ LEDпјҢе…¶зӣ®зҡ„жҳҜиЎЁжҳҺзі»з»ҹзҡ„зҠ¶жҖҒжҳҜ OK иҝҳжҳҜ ErrorгҖӮеҰӮжһңжқҝеӯҗдёҠжІЎжңү LEDпјҢйӮЈд№Ҳд№ҹеҸҜд»ҘйҖҡиҝҮеҲқе§ӢеҢ– UART еҗ‘дёІеҸЈжү“еҚ° Boot Loader зҡ„ Logo еӯ—з¬ҰдҝЎжҒҜжқҘе®ҢжҲҗиҝҷдёҖзӮ№гҖӮ
5пјҺе…ій—ӯ CPU еҶ…йғЁжҢҮд»ӨпјҸж•°жҚ® cacheгҖӮ(2)дёәеҠ иҪҪ stage2 еҮҶеӨҮ RAM з©әй—ҙ
дёәдәҶиҺ·еҫ—жӣҙеҝ«зҡ„жү§иЎҢйҖҹеәҰпјҢйҖҡеёёжҠҠ
stage2 еҠ иҪҪеҲ° RAM з©әй—ҙдёӯжқҘжү§иЎҢпјҢеӣ жӯӨеҝ…йЎ»дёәеҠ иҪҪ Boot Loader зҡ„ stage2 еҮҶеӨҮеҘҪдёҖж®өеҸҜз”Ёзҡ„ RAM з©әй—ҙиҢғеӣҙгҖӮ
(3) жӢ·иҙқ stage2 еҲ° RAM дёӯ
жӢ·иҙқж—¶иҰҒзЎ®е®ҡдёӨзӮ№пјҡ(1) stage2 зҡ„еҸҜжү§иЎҢжҳ иұЎеңЁеӣәжҖҒеӯҳеӮЁи®ҫеӨҮзҡ„еӯҳж”ҫиө·е§Ӣең°еқҖе’Ңз»Ҳжӯўең°еқҖпјӣ(2) RAM з©әй—ҙзҡ„иө·е§Ӣең°еқҖгҖӮ
(4)и®ҫзҪ®е Ҷж ҲжҢҮй’Ҳ sp
е Ҷж ҲжҢҮй’Ҳзҡ„и®ҫзҪ®жҳҜдёәдәҶжү§иЎҢ C иҜӯиЁҖд»Јз ҒдҪңеҘҪеҮҶеӨҮгҖӮйҖҡеёёжҲ‘们еҸҜд»ҘжҠҠ sp зҡ„еҖји®ҫзҪ®дёә(stage2_end-4)пјҢд№ҹеҚіеңЁ 3.1.2 иҠӮжүҖе®үжҺ’зҡ„йӮЈдёӘ 1MB зҡ„ RAM з©әй—ҙзҡ„жңҖйЎ¶з«Ҝ(е Ҷж Ҳеҗ‘дёӢз”ҹй•ҝ)гҖӮ
жӯӨеӨ–пјҢеңЁи®ҫзҪ®е Ҷж ҲжҢҮй’Ҳ sp д№ӢеүҚпјҢд№ҹеҸҜд»Ҙе…ій—ӯ led зҒҜпјҢд»ҘжҸҗзӨәз”ЁжҲ·жҲ‘们еҮҶеӨҮи·іиҪ¬еҲ° stage2гҖӮ
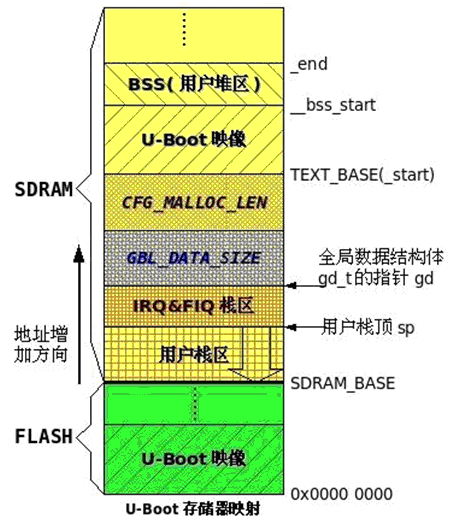
з»ҸиҝҮдёҠиҝ°иҝҷдәӣжү§иЎҢжӯҘйӘӨеҗҺпјҢзі»з»ҹзҡ„зү©зҗҶеҶ…еӯҳеёғеұҖеә”иҜҘеҰӮдёӢеӣҫ2жүҖзӨәгҖӮ
(5) и·іиҪ¬еҲ° stage2 зҡ„ C е…ҘеҸЈзӮ№
еңЁдёҠиҝ°дёҖеҲҮйғҪе°ұз»ӘеҗҺпјҢе°ұеҸҜд»Ҙи·іиҪ¬еҲ° Boot Loader зҡ„ stage2 еҺ»жү§иЎҢдәҶгҖӮжҜ”еҰӮпјҢеңЁ ARM зі»з»ҹдёӯпјҢиҝҷеҸҜд»ҘйҖҡиҝҮдҝ®ж”№ PC еҜ„еӯҳеҷЁдёәеҗҲйҖӮзҡ„ең°еқҖжқҘе®һзҺ°гҖӮ
дә”гҖҒstage2
1еҲқе§ӢеҢ–жң¬йҳ¶ж®өиҰҒдҪҝз”ЁеҲ°зҡ„硬件и®ҫеӨҮ
2 жЈҖжөӢзі»з»ҹзҡ„еҶ…еӯҳжҳ е°„пјҲmemory mapпјү3
еҠ иҪҪеҶ…ж ёжҳ еғҸе’Ңж №ж–Ү件系з»ҹжҳ еғҸ
4
и®ҫзҪ®еҶ…ж ёзҡ„еҗҜеҠЁеҸӮж•°
5
и°ғз”ЁеҶ…ж ё
е…ӯгҖҒеҲ°иҝҷйҮҢпјҢbootloaderзҡ„е·ҘдҪңе°ұе®ҢжҲҗдәҶпјҢејҖе§Ӣжңүlinux kernelз®ЎзҗҶ硬件гҖӮ
**********************************************************************************
дёӢйқўејҖе§ӢеҲҶжһҗu-bootпјҢе…ҲзңӢдёҖдёӢu-bootзҡ„еӯҳеӮЁеҷЁжҳ е°„еӣҫ
ubootдёҠз”өиҝҗиЎҢзҡ„第дёҖдёӘж–Ү件жҳҜstart.sпјҢе®ғдҪҚдәҺжҜҸдёӘж–Ү件еӨ№cpuдёӢзҡ„дёҚеҗҢе№іеҸ°дёӯпјҢжҜ”еҰӮmini2440зҡ„start.sдҪҚдәҺarm920tдёӢ
#include <common.h>
#include <config.h>
/*
*************************************************************************
*
* Jump vector table as in table 3.1 in [1]
*
*************************************************************************
*/
.globl _start
_start: b
start_code ;дёҠз”өиҝҗиЎҢзҡ„第дёҖжқЎжҢҮд»ӨпјҢи·іиҪ¬еҲ°start_codeеӨ„жү§иЎҢ
ldr pc, _undefined_instruction;жӯӨеӨ„ејӮеёёеӨ„зҗҶзҡ„йЎәеәҸжҳҜеӣәе®ҡзҡ„
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
_undefined_instruction: .word undefined_instruction
_software_interrupt: .word software_interrupt
_prefetch_abort: .word prefetch_abort
_data_abort: .word data_abort
_not_used: .word not_used
_irq: .word irq
_fiq: .word fiq
.balignl 16,0xdeadbeef
/*
*************************************************************************
*
* Startup Code (called from the ARM reset exception vector)
*
* do important init only if we don't start from memory!
* relocate armboot to ram
* setup stack
* jump to second stage
*
*************************************************************************
*/
/*еӯҳеӮЁеҷЁжҳ е°„пјҢеҰӮдёҠеӣҫ*/
_TEXT_BASE:
.word TEXT_BASE
.globl _armboot_start
_armboot_start:
.word _start
/*
* These are defined in the board-specific linker script.
*/
.globl _bss_start
_bss_start:
.word __bss_start
.globl _bss_end
_bss_end:
.word _end
#ifdef CONFIG_USE_IRQ
/* IRQ stack memory (calculated at run-time) */
.globl IRQ_STACK_START
IRQ_STACK_START:
.word 0x0badc0de
/* IRQ stack memory (calculated at run-time) */
.globl FIQ_STACK_START
FIQ_STACK_START:
.word 0x0badc0de
#endif
/*
* the actual start code
зңҹжӯЈзҡ„жҢҮд»ӨејҖе§ӢеӨ„
*/
start_code:
/*
* set the cpu to SVC32 mode
*/
mrs r0, cpsr
bic r0, r0, #0x1f;иҝҷйҮҢиҰҒеҜ№з…§2440зҡ„datasheetдёӯзҡ„cpsrеҜ„еӯҳеҷЁпјҢеұҸи”ҪйҷӨдәҶmodeзҡ„жүҖжңүдҪҚ
orr r0, r0, #0xd3;и®ҫзҪ®modeдёәsvcпјҲи¶…зә§з”ЁжҲ·пјҢжңҖй«ҳжқғйҷҗпјүпјҢжӯӨеӨ„irqпјҢfiqзҪ®1пјҢе…ій—ӯдёӯж–ӯ
msr cpsr, r0
@ bl coloured_LED_init;еҸҜд»ҘзӮ№дә®дёҖдёӘledпјҢжҢҮзӨәu-bootе·Із»ҸејҖе§ӢиҝҗиЎҢпјҢеҮҪж•°еңЁboardж–Ү件еӨ№дёӢзҡ„е…·дҪ“жқҝзә§ж–Ү件йҮҢ
@ bl red_LED_on;жҢҮд»ӨblжҳҜеёҰиҝ”еӣһзҡ„и·іиҪ¬пјҢиҝҗиЎҢе®Ңred_LED_onеҮҪж•°еҗҺпјҢдјҡеӣһеҲ°жӯӨеӨ„继з»ӯеҫҖдёӢжү§иЎҢ
#if defined(CONFIG_AT91RM9200DK) || defined(CONFIG_AT91RM9200EK)
/*
* relocate exception table
*/
ldr r0, =_start
ldr r1, =0x0
mov r2, #16
copyex:
subs r2, r2, #1
ldr r3, [r0], #4
str r3, [r1], #4
bne copyex
#endif
#ifdef CONFIG_S3C24X0
/* turn off the watchdog */
/*s3c2440жүӢеҶҢдёӯжңүд»ҘдёӢзү№ж®ҠеҜ„еӯҳеҷЁзҡ„еҶ…еӯҳең°еқҖ*/
# if defined(CONFIG_S3C2400)
# define pWTCON 0x15300000
# define INTMSK 0x14400008/* Interupt-Controller base addresses */
# define CLKDIVN 0x14800014/* clock divisor register */
#else
# define pWTCON 0x53000000
# define INTMSK 0x4A000008/* Interupt-Controller base addresses */
# define INTSUBMSK 0x4A00001C
# define CLKDIVN 0x4C000014/* clock divisor register */
# endif
#define CLK_CTL_BASE 0x4C000000/* tekkaman */
#define MDIV_405 0x7f << 12/* tekkaman */
#define PSDIV_405 0x21/* tekkaman */
#define MDIV_200 0xa1 << 12/* tekkaman */
#define PSDIV_200 0x31/* tekkaman */
ldr r0, =pWTCON;еҠ иҪҪең°еқҖ0x53000000еҲ°r0
mov r1, #0x0;и®ҫзҪ®r1дёә0x0
str r1, [r0];еңЁең°еқҖ0x53000000еӨ„еҶҷ0пјҢе…ій—ӯwatchdog
/*
* mask all IRQs by setting all bits in the INTMR - default
*/
mov r1, #0xffffffff
ldr r0, =INTMSK
str r1, [r0];INTMSKдёӯж–ӯеұҸи”ҪеҜ„еӯҳеҷЁпјҢ32дҪҚеҜ„еӯҳеҷЁпјҢжҜҸдёҖдёӘйғҪжҳҜе’ҢдёҖдёӘдёӯж–ӯжәҗзӣёе…іпјҢзҪ®1еҲҷдёҚе“Қеә”дёӯж–ӯиҜ·жұӮпјҢиҝҷйҮҢдёҚе“Қеә”жүҖжңүиҜ·жұӮпјҢе…ій—ӯдёӯж–ӯпјҢй…ҚеҗҲcpsrзҡ„fдёҺiдҪҚ
# if defined(CONFIG_S3C2410)
ldr r1, =0x7ff
ldr r0, =INTSUBMSK
str r1, [r0]
# endif
#if defined(CONFIG_S3C2440)
ldr r1, =0x7fff
ldr r0, =INTSUBMSK;INTSUBMSKеӯҗдёӯж–ӯеұҸи”ҪеҜ„еӯҳеҷЁпјҢдёә15дҪҚпјҢзҪ®1дёҚе“Қеә”дёӯж–ӯиҜ·жұӮпјҢеҗҢINTMSK
str r1, [r0]
#endif
/*и®ҫзҪ®ж—¶й’ҹйў‘зҺҮ
*s3c2440жңүдёүдёӘж—¶й’ҹпјҢFCLKпјҢHCLKпјҢPCLK
*FCLK is used by ARM920TпјҢеҶ…ж ёж—¶й’ҹпјҢдё»йў‘
*HCLK is used for AHB bus ,which is used by the ARM920T, the memory controller,the interrupt controller,the lcd controller,the dma,and*usb host blockжҳҜжҖ»зәҝж—¶й’ҹпјҢеҢ…жӢ¬дё»иҰҒжҺ§еҲ¶еҷЁ
*PCLK is used for APB bus, which is used by the peripherals such as wdt,iis,i2c,pwm timer,mmc interface,adc,uart,gpio,rtc and spiеҚіжҺҘеҸЈж—¶й’ҹпјҢ
*дёүдёӘж—¶й’ҹйҖҡеёёи®ҫдёә1:4:8жҲ–иҖ…1:3:6
*/
#if defined(CONFIG_S3C2440)
/* FCLK:HCLK:PCLK = 1:4:8 */
ldr r0, =CLKDIVN;
mov r1, #5
str r1, [r0]
/*CP15зі»з»ҹжҺ§еҲ¶еҚҸеӨ„зҗҶеҷЁпјҢйҖҡиҝҮеҚҸеӨ„зҗҶеҷЁжҢҮд»Өmrcе’ҢmcrжҸҗдҫӣе…·дҪ“зҡ„еҜ„еӯҳеҷЁжқҘй…ҚзҪ®е’ҢжҺ§еҲ¶cachesпјҢmmuпјҢдҝқжҠӨзі»з»ҹпјҢй…ҚзҪ®ж—¶й’ҹжЁЎејҸпјҲеңЁbootloaderж—¶й’ҹеҲқе§ӢеҢ–ж—¶з”ЁеҲ°пјүпјҢе…·дҪ“еҸӮзңӢarm architecture reference manual 2nd 第487йЎө*/
mrcp15, 0, r1, c1, c0, 0
orr r1, r1, #0xc0000000
mcr p15, 0, r1, c1, c0, 0
/*CLK_CTL_BASE=
0x4c000000
*MPLLCON=0x4c000004
*MDIV_405=0x7f<<12пјҢйҖүжӢ©12MHzиҫ“е…Ҙйў‘зҺҮпјҢ405MMzиҫ“еҮәйў‘зҺҮ
*MPLLCONз”ұMDIV[19:12] \ PDIV[9:4] \ SDIV[1:0]еҶіе®ҡ
*еҜ№з…§datasheetпјҢmdivдёә0x7fпјҢpdivдёә0x02пјҢsdivдёә0x01
*/
mov r1, #CLK_CTL_BASE
mov r2, #MDIV_405
add r2, r2, #PSDIV_405
str r2, [r1, #0x04]/* MPLLCON tekkaman */
#else
/* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
ldr r0, =CLKDIVN
mov r1, #3
str r1, [r0]
mrc p15, 0, r1, c1, c0, 0
orr r1, r1, #0xc0000000
mcr p15, 0, r1, c1, c0, 0/*write ctrl register tekkaman*/
mov r1, #CLK_CTL_BASE/* tekkaman*/
mov r2, #MDIV_200
add r2, r2, #PSDIV_200
str r2, [r1, #0x04]
#endif
#endif /* CONFIG_S3C24X0 */
/*
* we do sys-critical inits only at reboot,
* not when booting from ram!
*/
#ifndef CONFIG_SKIP_LOWLEVEL_INIT ;еҰӮжһңжІЎжңүе®ҡд№үCONFIG_SKIP_LOWLEVEL_INITпјҢе°ұи·іиҪ¬еҲ°cpu_init_critеӨ„иҝӣиЎҢеҲқе§ӢеҢ–е·ҘдҪңпјҢжҲ‘们еҪ“然дёҚдјҡи°ғиҝҮеә•еұӮзҡ„еҲқе§ӢеҢ–пјҢеӣ дёәLOWLEVEL_INITдјҡеҜ№жҲ‘们зҡ„sdramиҝӣиЎҢеҲқе§ӢеҢ–пјҢиҝҷеҜ№жҲ‘们зҡ„cpuжҳҜеҝ…иҰҒзҡ„
bl cpu_init_crit;еҮҪж•°дҪҚзҪ®пјҹ
#endif
/***************** CHECK_CODE_POSITION *****************************************
*жЈҖжҹҘд»Јз ҒиҝҗиЎҢзҡ„дҪҚзҪ®пјҢеӣ дёә_startжҳҜзЁӢеәҸжү§иЎҢзҡ„第дёҖжқЎд»Јз ҒпјҢжүҖд»ҘеҰӮжһңеңЁflashдёӯиҝҗиЎҢпјҢ_startзҡ„еҖјеә”дёә0пјҢ
*иҖҢеҰӮжһңеңЁramдёӯиҝҗиЎҢпјҢ_startеҲҷдёҚдёә0пјҢдҪҶжҳҜ_startдёәдҪ•зӯүдәҺ_TEXT_BASEпјҹ
*/
adr r0, _start/* r0 <- current position of code */
ldr r1, _TEXT_BASE/* test if we run from flash or RAM */
cmp r0, r1/* don't reloc during debug */
beq stack_setup;иӢҘr0==r1пјҢеҲҷи·іиҪ¬еҲ°stack_setup
/***************** CHECK_CODE_POSITION ******************************************/
/***************** CHECK_BOOT_FLASH ******************************************/
ldr r1, =( (4<<28)|(3<<4)|(3<<2) )/* address of Internal SRAM 0x4000003C*/
mov r0, #0/* r0 = 0 */
str r0, [r1]
mov r1, #0x3c/* address of men 0x0000003C*/
ldr r0, [r1]
cmp r0, #0
bne relocate
/* recovery */
ldr r0, =(0xdeadbeef)
ldr r1, =( (4<<28)|(3<<4)|(3<<2) )
str r0, [r1]
/***************** CHECK_BOOT_FLASH ******************************************/
/***************** NAND_BOOT *************************************************/
#define LENGTH_UBOOT 0x60000
#define NAND_CTL_BASE 0x4E000000
#ifdef CONFIG_S3C2440
/* Offset */
#define oNFCONF 0x00
#define oNFCONT 0x04
#define oNFCMD 0x08
#define oNFSTAT 0x20
@ reset NAND
mov r1, #NAND_CTL_BASE
ldr r2, =( (7<<12)|(7<<8)|(7<<4)|(0<<0) )
str r2, [r1, #oNFCONF]
ldr r2, [r1, #oNFCONF]
ldr r2, =( (1<<4)|(0<<1)|(1<<0) )@ Active low CE Control
str r2, [r1, #oNFCONT]
ldr r2, [r1, #oNFCONT]
ldr r2, =(0x6)@ RnB Clear
str r2, [r1, #oNFSTAT]
ldr r2, [r1, #oNFSTAT]
mov r2, #0xff@ RESET command
strb r2, [r1, #oNFCMD]
mov r3, #0@ wait
nand1:
add r3, r3, #0x1
cmp r3, #0xa
blt nand1
nand2:
ldr r2, [r1, #oNFSTAT]@ wait ready
tst r2, #0x4
beq nand2
ldr r2, [r1, #oNFCONT]
orr r2, r2, #0x2@ Flash Memory Chip Disable
str r2, [r1, #oNFCONT]
@ get read to call C functions (for nand_read())
ldr sp, DW_STACK_START@ setup stack pointer
mov fp, #0@ no previous frame, so fp=0
@ copy U-Boot to RAM
ldr r0, =TEXT_BASE
mov r1, #0x0
mov r2, #LENGTH_UBOOT
bl nand_read_ll
tst r0, #0x0
beq ok_nand_read
bad_nand_read:
loop2:
b loop2@ infinite loop
ok_nand_read:
@ verify
mov r0, #0
ldr r1, =TEXT_BASE
mov r2, #0x400@ 4 bytes * 1024 = 4K-bytes
go_next:
ldr r3, [r0], #4
ldr r4, [r1], #4
teq r3, r4
bne notmatch
subs r2, r2, #4
beq stack_setup
bne go_next
notmatch:
loop3:
b loop3@ infinite loop
#endif
#ifdef CONFIG_S3C2410
/* Offset */
#define oNFCONF 0x00
#define oNFCMD 0x04
#define oNFSTAT 0x10
@ reset NAND
mov r1, #NAND_CTL_BASE
ldr r2, =0xf830@ initial value
str r2, [r1, #oNFCONF]
ldr r2, [r1, #oNFCONF]
bic r2, r2, #0x800@ enable chip
str r2, [r1, #oNFCONF]
mov r2, #0xff@ RESET command
strb r2, [r1, #oNFCMD]
mov r3, #0@ wait
nand1:
add r3, r3, #0x1
cmp r3, #0xa
blt nand1
nand2:
ldr r2, [r1, #oNFSTAT]@ wait ready
tst r2, #0x1
beq nand2
ldr r2, [r1, #oNFCONF]
orr r2, r2, #0x800@ disable chip
str r2, [r1, #oNFCONF]
@ get read to call C functions (for nand_read())
ldr sp, DW_STACK_START@ setup stack pointer
mov fp, #0@ no previous frame, so fp=0
@ copy U-Boot to RAM
ldr r0, =TEXT_BASE
mov r1, #0x0
mov r2, #LENGTH_UBOOT
bl nand_read_ll
tst r0, #0x0
beq ok_nand_read
bad_nand_read:
loop2:
b loop2@ infinite loop
ok_nand_read:
@ verify
mov r0, #0
ldr r1, =TEXT_BASE
mov r2, #0x400@ 4 bytes * 1024 = 4K-bytes
go_next:
ldr r3, [r0], #4
ldr r4, [r1], #4
teq r3, r4
bne notmatch
subs r2, r2, #4
beq stack_setup
bne go_next
notmatch:
loop3:
b loop3@ infinite loop
#endif
/***************** NAND_BOOT *************************************************/
/***************** NOR_BOOT *************************************************/
relocate: /* relocate U-Boot to RAM */
/*********** CHECK_FOR_MAGIC_NUMBER***************/
ldr r1, =(0xdeadbeef)
cmp r0, r1
bne loop3
/*********** CHECK_FOR_MAGIC_NUMBER***************/
adr r0, _start/* r0 <- current position of code */
ldr r1, _TEXT_BASE/* test if we run from flash or RAM */
ldr r2, _armboot_start
ldr r3, _bss_start
sub r2, r3, r2/* r2 <- size of armboot */
add r2, r0, r2/* r2 <- source end address */
copy_loop:
ldmia r0!, {r3-r10}/* copy from source address [r0] */
stmia r1!, {r3-r10}/* copy to target address [r1] */
cmp r0, r2/* until source end addreee [r2] */
ble copy_loop
/***************** NOR_BOOT *************************************************/
/*иӢҘд»Јз ҒеңЁramдёӯиҝҗиЎҢпјҢеҲҷзӣҙжҺҘи·іеҲ°жӯӨеӨ„пјҢејҖе§Ӣи®ҫзҪ®sp*/
/* Set up the stack */
stack_setup:
ldr r0, _TEXT_BASE/* upper 128 KiB: relocated uboot */
sub r0, r0, #CONFIG_SYS_MALLOC_LEN/* malloc area */
sub r0, r0, #CONFIG_SYS_GBL_DATA_SIZE /* bdinfo */
#ifdef CONFIG_USE_IRQ
sub r0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ)
#endif
subsp, r0, #12
/* leave 3 words for abort-stack */
/*еҜ№з…§дёӢеӣҫйҳ…иҜ»дёҠиҝ°д»Јз ҒпјҢз”ЁжҲ·ж ҲеҢәspеҫҖдёӢз”ҹй•ҝ*/
/*жё…йӣ¶bss*/
clear_bss:
ldr r0, _bss_start/* find start of bss segment */
ldr r1, _bss_end/* stop here */
mov r2, #0x00000000/* clear */
/*жё…йӣ¶еҫӘзҺҜпјҢз©әй—ҙдёә32дҪҚпјҢжүҖд»Ҙadd r0,r0,#4(4дёӘеӯ—иҠӮ)*/
clbss_l:str r2, [r0]/* clear loop... */
add r0, r0, #4
cmp r0, r1
ble clbss_l
/*еҮҶеӨҮи·іиҪ¬еҲ°stage2пјҢldrдёҺbзҡ„еҢәеҲ«пјҹ
*start_armbootеңЁlib_arm/board.cж–Ү件дёӯ
*/
ldrpc, _start_armboot
#if defined(CONFIG_MINI2440_LED)
#define GPIO_CTL_BASE 0x56000000
#define oGPIO_B 0x10
#define oGPIO_CON 0x0
/* R/W, Configures the pins of the port */
#define oGPIO_DAT 0x4
#define oGPIO_UP 0x8
/* R/W, Pull-up disable register */
mov r1, #GPIO_CTL_BASE
add r1, r1, #oGPIO_B
ldr r2, =0x295551
str r2, [r1, #oGPIO_CON]
mov r2, #0xff
str r2, [r1, #oGPIO_UP]
ldr r2, =0x1c1
str r2, [r1, #oGPIO_DAT]
#endif
_start_armboot: .word start_armboot
#define STACK_BASE 0x33f00000
#define STACK_SIZE 0x10000
.align
2
DW_STACK_START: .wordSTACK_BASE+STACK_SIZE-4
/*
*************************************************************************
*
* CPU_init_critical registers
*
* setup important registers
* setup memory timing
*
*
*/
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
cpu_init_crit:
/*
* flush v4 I/D caches
*жё…йӣ¶ж•°жҚ®cacheдёҺжҢҮд»Өcache
*жё…йӣ¶TLB
*/
mov r0, #0
mcr p15, 0, r0, c7, c7, 0/* flush v3/v4 cache */
mcr p15, 0, r0, c8, c7, 0/* flush v4 TLB */
/*
* disable MMU stuff and caches
*е…ій—ӯMMUдёҺcacheпјҢеҝ…йЎ»е…ій—ӯпјҢдёҚдјҡеӣһжңүи„Ҹж•°жҚ®пјҢеҪұе“ҚжӯЈзЎ®иҝҗиЎҢ
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002300@ clear bits 13, 9:8 (--V- --RS)
bic r0, r0, #0x00000087@ clear bits 7, 2:0 (B--- -CAM)
orr r0, r0, #0x00000002@ set bit 2 (A) Align
orr r0, r0, #0x00001000@ set bit 12 (I) I-Cache
mcr p15, 0, r0, c1, c0, 0
/*
* before relocating, we have to setup RAM timing
* because memory timing is board-dependend, you will
* find a lowlevel_init.S in your board directory.
*/
mov ip, lr
/*еңЁcpu_init_critдёӯеҸҲи°ғз”ЁеӨ–йғЁеҮҪж•°lowlevel_initпјҢеӣ жӯӨиҰҒдәӢе…ҲдҝқжҠӨеҘҪlrеҜ„еӯҳеҷЁзҡ„еҶ…е®№пјҢеҪ“иҝ”еӣһж—¶еҖҷпјҢеҶҚжҒўеӨҚе®ғ
*еҜ„еӯҳеҷЁr12пјҢз”ЁдҪңиҝҮзЁӢи°ғз”Ёдёӯй—ҙдёҙж—¶еҜ„еӯҳеҷЁпјҢи®°дҪңipпјҢеңЁеӯҗзЁӢеәҸй—ҙзҡ„иҝһжҺҘд»Јз Ғж®өдёӯеёёжңүиҝҷз§ҚдҪҝ用规еҲҷ
*еҜ„еӯҳеҷЁr14пјҢз§°дёәиҝһжҺҘеҜ„еӯҳеҷЁпјҢи®°дҪңlrпјҢе®ғз”ЁдәҺдҝқеӯҳеӯҗзЁӢеәҸзҡ„иҝ”еӣһең°еқҖ
*/
bl lowlevel_init;дҫқиө–е…·дҪ“зҡ„board
mov lr, ip
mov pc, lr;дҝқеӯҳcpu_init_critзҡ„иҝ”еӣһең°еқҖ
#endif /* CONFIG_SKIP_LOWLEVEL_INIT */
/*
*************************************************************************
*
* Interrupt handling
*
*************************************************************************
*/
@
@ IRQ stack frame.
@
#define S_FRAME_SIZE 72
#define S_OLD_R0 68
#define S_PSR 64
#define S_PC 60
#define S_LR 56
#define S_SP 52
#define S_IP 48
#define S_FP 44
#define S_R10 40
#define S_R9 36
#define S_R8 32
#define S_R7 28
#define S_R6 24
#define S_R5 20
#define S_R4 16
#define S_R3 12
#define S_R2 8
#define S_R1 4
#define S_R0 0
#define MODE_SVC 0x13
#define I_BIT 0x80
/*
* use bad_save_user_regs for abort/prefetch/undef/swi ...
* use irq_save_user_regs / irq_restore_user_regs for IRQ/FIQ handling
*/
.macro
bad_save_user_regs
sub sp, sp, #S_FRAME_SIZE
stmia sp, {r0 - r12}@ Calling r0-r12
ldr r2, _armboot_start
sub r2, r2, #(CONFIG_STACKSIZE)
sub r2, r2, #(CONFIG_SYS_MALLOC_LEN)
/* set base 2 words into abort stack */
sub r2, r2, #(CONFIG_SYS_GBL_DATA_SIZE+8)
ldmia r2, {r2 - r3}@ get pc, cpsr
add r0, sp, #S_FRAME_SIZE@ restore sp_SVC
add r5, sp, #S_SP
mov r1, lr
stmia r5, {r0 - r3}@ save sp_SVC, lr_SVC, pc, cpsr
mov r0, sp
.endm
.macro
irq_save_user_regs
sub sp, sp, #S_FRAME_SIZE
stmia sp, {r0 - r12}@ Calling r0-r12
add r7, sp, #S_PC
stmdb r7, {sp, lr}^@ Calling SP, LR
str lr, [r7, #0]@ Save calling PC
mrs r6, spsr
str r6, [r7, #4]@ Save CPSR
str r0, [r7, #8]@ Save OLD_R0
mov r0, sp
.endm
.macro
irq_restore_user_regs
ldmia sp, {r0 - lr}^@ Calling r0 - lr
mov r0, r0
ldr lr, [sp, #S_PC]@ Get PC
add sp, sp, #S_FRAME_SIZE
/* return & move spsr_svc into cpsr */
subs pc, lr, #4
.endm
.macro get_bad_stack
ldr r13, _armboot_start@ setup our mode stack
sub r13, r13, #(CONFIG_STACKSIZE)
sub r13, r13, #(CONFIG_SYS_MALLOC_LEN)
/* reserve a couple spots in abort stack */
sub r13, r13, #(CONFIG_SYS_GBL_DATA_SIZE+8)
str lr, [r13]@ save caller lr / spsr
mrs lr, spsr
str lr, [r13, #4]
mov r13, #MODE_SVC@ prepare SVC-Mode
@ msr spsr_c, r13
msr spsr, r13
mov lr, pc
movs pc, lr
.endm
.macro get_irq_stack@ setup IRQ stack
ldr sp, IRQ_STACK_START
.endm
.macro get_fiq_stack@ setup FIQ stack
ldr sp, FIQ_STACK_START
.endm
/*
* exception handlers
*/
.align 5
undefined_instruction:
get_bad_stack
bad_save_user_regs
bl do_undefined_instruction
.align
5
software_interrupt:
get_bad_stack
bad_save_user_regs
bl do_software_interrupt
.align
5
prefetch_abort:
get_bad_stack
bad_save_user_regs
bl do_prefetch_abort
.align
5
data_abort:
get_bad_stack
bad_save_user_regs
bl do_data_abort
.align
5
not_used:
get_bad_stack
bad_save_user_regs
bl do_not_used
#ifdef CONFIG_USE_IRQ
.align
5
irq:
//Apollo +
/*
get_irq_stack
irq_save_user_regs
bl do_irq
irq_restore_user_regs
*/
/* use IRQ for USB and DMA */
sub lr, lr, #4 @ the return address
ldr sp, IRQ_STACK_START @ the stack for irq
stmdb sp!, { r0-r12,lr } @ save registers
ldr lr, =int_return @ set the return addr
ldr pc, =IRQ_Handle @ call the isr
int_return:
ldmia sp!, { r0-r12,pc }^ @ return from interrupt
//Apollo -
.align
5
fiq:
get_fiq_stack
/* someone ought to write a more effiction fiq_save_user_regs */
irq_save_user_regs
bl do_fiq
irq_restore_user_regs
#else
.align
5
irq:
get_bad_stack
bad_save_user_regs
bl do_irq
.align
5
fiq:
get_bad_stack
bad_save_user_regs
bl do_fiq
#endif


- 2011-11-10 14:48
- жөҸи§Ҳ 1174
- иҜ„и®ә(0)
- жҹҘзңӢжӣҙеӨҡ
еҸ‘иЎЁиҜ„и®ә

зӣёе…іжҺЁиҚҗ
жң¬ж–Үд»Һд»ҘдёӢеҮ дёӘж–№йқўзІ—жө…ең°еҲҶжһҗu-boot并移жӨҚеҲ°FS2410жқҝдёҠпјҡ 1гҖҒu-bootе·ҘзЁӢзҡ„жҖ»дҪ“з»“жһ„ 2гҖҒu-bootзҡ„жөҒзЁӢгҖҒдё»иҰҒзҡ„ж•°жҚ®з»“жһ„гҖҒеҶ…еӯҳеҲҶй…ҚгҖӮ 3гҖҒu-bootзҡ„йҮҚиҰҒз»ҶиҠӮпјҢдё»иҰҒеҲҶжһҗжөҒзЁӢдёӯеҗ„еҮҪж•°зҡ„еҠҹиғҪгҖӮ 4гҖҒеҹәдәҺFS2410жқҝеӯҗзҡ„u-boot...
U-Boot жәҗз ҒеҲҶжһҗпјҲu-boot-2009.03пјүпјҢеҗҺз»ӯдјҡжңү移жӨҚиҜҰз»Ҷж•ҷзЁӢгҖӮ
U-Boot-1.3.1жәҗз ҒеҲҶжһҗиҜҫ件пјҢе…Ҙй—ЁU-BootеҲ©еҷЁ
ејҖеҸ‘жқҝдёҠз”өеҗҺпјҢжү§иЎҢU-Bootзҡ„第дёҖжқЎжҢҮд»ӨпјҢ然еҗҺйЎәеәҸжү§иЎҢU-BootеҗҜеҠЁеҮҪж•°гҖӮеҮҪж•°и°ғз”ЁйЎәеәҸеҰӮеӣҫ6.3жүҖзӨәгҖӮ зңӢдёҖдёӢboard/smsk2410/u-boot.ldsиҝҷдёӘй“ҫжҺҘи„ҡжң¬пјҢеҸҜд»ҘзҹҘйҒ“зӣ®ж ҮзЁӢеәҸзҡ„еҗ„йғЁеҲҶй“ҫжҺҘйЎәеәҸгҖӮ第дёҖдёӘиҰҒй“ҫжҺҘзҡ„жҳҜcpu/arm920t/...
жң¬ж–ҮеҲҶжһҗдәҶu-boot-2018.09пјҢеҜ№дәҺеӯҰд№ е’Ң移жӨҚu-bootзҡ„жңӢеҸӢдјҡжңүеё®еҠ©
u-bootзҡ„MakefileеҲҶжһҗ u-bootзҡ„MakefileеҲҶжһҗ
иҜҘж–Ү件жҳҜu-bootеҲҶжһҗ第дёҖйҳ¶ж®өе’Ң第дәҢйҳ¶ж®өжөҒзЁӢеӣҫпјҡlowlevel_initе’Ңstart_armbootпјҢе…·дҪ“еҲҶжһҗзҡ„ж–Үз« еҰӮдёӢпјҡ lowlevel_initпјҡhttps://blog.csdn.net/zi_yang_/article/details/89182278 start_armbootпјҡ...
U-BootеҗҜеҠЁиҝҮзЁӢе®Ңе…ЁеҲҶжһҗ,U-BootеҗҜеҠЁеҶ…ж ёзҡ„иҝҮзЁӢеҸҜд»ҘеҲҶдёәдёӨдёӘйҳ¶ж®ө
еҫҲеҘҪзҡ„U-bootжәҗз ҒеҲҶжһҗиө„ж–ҷпјҢйқһеёёиҜҰз»ҶпјҢеҸ—зӣҠеҢӘжө…
u-boot-2010.06жәҗз Ғmakeжү§иЎҢиҝҮзЁӢ
U-BOOT MAKEFILE еҲҶжһҗ
иҜҰз»Ҷзҡ„и®Іи§ЈдәҶu-bootеҗҜеҠЁд»Јз Ғзҡ„移жӨҚиҝҮзЁӢпјҢиҝҳжңүеёёйҒҮеҲ°зҡ„й—®йўҳеҲҶжһҗи§ЈеҶіпјҢu-boot иҝҗиЎҢиҪЁиҝ№зҡ„иҜҰз»ҶеҲҶжһҗпјҢиғҪи®©дҪ дёҚд»…д»…еӯҰдјҡ移жӨҚu-bootпјҢиҝҳиғҪзҹҘйҒ“移жӨҚu-bootзҡ„з»ҶиҠӮеҺҹзҗҶгҖӮ
U-bootеңЁARM9дёӢйқўзҡ„移жӨҚдёҺеҲҶжһҗпјҢиҜҰз»Ҷд»Ӣз»ҚU-Bootд»Јз Ғз»„жҲҗ
U-BOOTжәҗз ҒеҲҶжһҗеҸҠ移жӨҚ жң¬ж–Үд»Һд»ҘдёӢеҮ дёӘж–№йқўзІ—жө…ең°еҲҶжһҗu-boot并移жӨҚеҲ°FS2410жқҝдёҠпјҡ 1гҖҒu-bootе·ҘзЁӢзҡ„жҖ»дҪ“з»“жһ„ 2гҖҒu-bootзҡ„жөҒзЁӢгҖҒдё»иҰҒзҡ„ж•°жҚ®з»“жһ„гҖҒеҶ…еӯҳеҲҶй…ҚгҖӮ 3гҖҒu-bootзҡ„йҮҚиҰҒз»ҶиҠӮпјҢдё»иҰҒеҲҶжһҗжөҒзЁӢдёӯеҗ„еҮҪж•°зҡ„еҠҹиғҪгҖӮ 4гҖҒ...
u-boot makefile еҲҶжһҗ
иҝҷжҳҜеҚҡеҲӣ科жҠҖзҡ„йҖҡз”Ёbootloader u-bootзҡ„и®Іи§ЈиҜҫ件пјҢеҢ…жӢ¬йғЁеҲҶд»Јз Ғе’Ңеј•еҜјиҝҮзЁӢеҲҶжһҗгҖӮ
u-bootеҲҶжһҗ,ubootд»Јз ҒиҜҰз»ҶеҲҶжһҗ,иҝҷжҳҜдёҖжң¬иө„ж·ұдәәеЈ«еҶҷзҡ„ubootеҲҶжһҗд»Јз ҒпјҢдёӘдәәзңӢдәҶд»ҘеҗҺж„ҹи§үеҸ—зӣҠеҢӘжө…
u-boot2017.01еҗҜеҠЁиҝҮзЁӢеҲҶжһҗпјҢд»Ҙpptзҡ„ж–№ејҸеҜ№uboot2017.11зҡ„еҗҜеҠЁиҝҮзЁӢиҝӣиЎҢеҲҶжһҗпјҢдё»иҰҒеҲҶжһҗдәҶеҗҜеҠЁиҝҮзЁӢеҮҪж•°зҡ„и°ғз”ЁиҝҮзЁӢ